Abstract
Weeds are undesired plants in agricultural fields that affect crop yield and quality by competing for nutrients, water, sunlight and space. For centuries, farmers have used several strategies and resources to remove weeds. The use of herbicide is still the most common control strategy. To reduce the amount of herbicide and impact caused by uniform spraying, site-specific weed management (SSWM) through variable rate herbicide application and mechanical weed control have long been recommended. To implement such precise strategies, accurate detection and classification of weeds in crop fields is a crucial first step. Due to the phenotypic similarity between some weeds and crops as well as changing weather conditions, it is challenging to design an automated system for general weed detection. For efficiency, unmanned aerial vehicles (UAV) are commonly used for image capturing. However, high wind pressure and different drone settings have a severe effect on the capturing quality, what potentially results in degraded images, e.g., due to motion blur. In this paper, we investigate the generalization capabilities of Deep Learning methods for early weed detection in sorghum fields under such challenging capturing conditions. For this purpose, we developed weed segmentation models using three different state-of-the-art Deep Learning architectures in combination with residual neural networks as feature extractors.
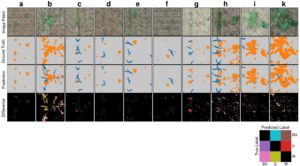
We further publish a manually annotated and expert-curated UAV imagery dataset for weed detection in sorghum fields under challenging conditions. Our results show that our trained models generalize well regarding the detection of weeds, even for degraded captures due to motion blur. An UNet-like architecture with a ResNet-34 feature extractor achieved an F1-score of over 89% on a hold-out test-set. Further analysis indicate that the trained model performed well in predicting the general plant shape, while most misclassifications appeared at borders of the plants. Beyond that, our approach can detect intra-row weeds without additional information as well as partly occluded plants in contrast to existing research.
All data, including the newly generated and annotated UAV imagery dataset, and code is publicly available on GitHub: https://github.com/grimmlab/UAVWeedSegmentation and Mendeley Data: https://doi.org/10.17632/4hh45vkp38.4.
Original Publication (Open Access)
Genze, N., Ajekwe, R., Güreli, Z., Haselbeck, F., Grieb, M., & Grimm, D. G. (2022).
Deep learning-based early weed segmentation using motion blurred UAV images of sorghum fields. Computers and Electronics in Agriculture, 202, 107388. https://doi.org/10.1016/j.compag.2022.107388